日立製作所は、ロボットアームなどに搭載可能で、反射的動作を制御できるコントローラーシステムを開発した。エッジ、I/Oの2つの小型コントローラーとリアルタイムネットワークにより、アプリケーションに応じて最適なシステムを構築できる。
日立製作所は2020年3月18日、ロボットのアームやハンドなど限定されたスペースに搭載可能で、反射的動作を制御できるコントローラーシステムを発表した。
このコントローラーシステムは、ディープラーニング処理により得た動作制御を実行するエッジコントローラーと、センサーやモーターなどの入出力処理をするI/Oコントローラー、それらをつなぐリアルタイムネットワークで構成される。
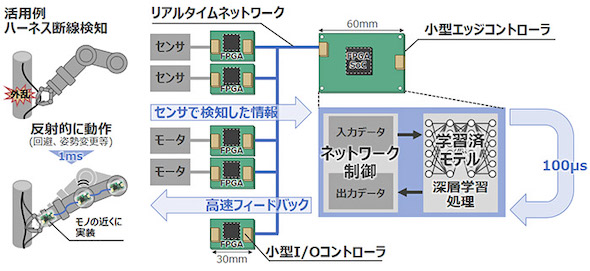 コントローラーシステムの構成 出典:日立製作所
コントローラーシステムの構成 出典:日立製作所エッジコントローラーには、CPUとFPGAを1チップに統合したFPGA SoCを搭載することで、CPUとFPGAの協調制御をやりやすくした。FPGAにはディープラーニング(深層学習)を処理する新開発の集積回路と、ネットワーク通信をリアルタイム処理する集積回路が搭載されており、CPU上のソフトウェアからこれらの集積回路を制御する。
回避や姿勢変更など反射的な動作の制御に必要な処理はハードウェアで完結し、高速でフィードバック制御する。試作したシステムで検証したところ、制御遅延1msと人の反射速度よりも速く反射動作が制御できることを確認した。
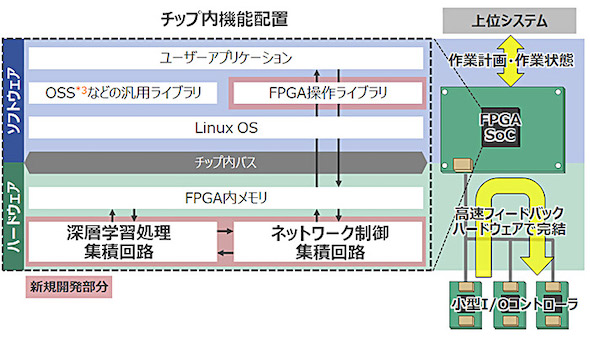 ソフトウェア、ハードウェアで協調して制御する小型エッジコントローラーの仕組み 出典:日立製作所
ソフトウェア、ハードウェアで協調して制御する小型エッジコントローラーの仕組み 出典:日立製作所I/Oコントローラーは、通信基板とその下にI/O基板を配置する基板2枚の構成とし、必要最低限の機能のみを搭載して小型化を図った。
さらに同社は、制御向けにFPGAを用いた独自のプロトコルを開発。同プロトコルを実行するネットワーク制御をそれぞれのコントローラーにハードウェア実装し、リアルタイムでのネットワーク処理を可能にした。
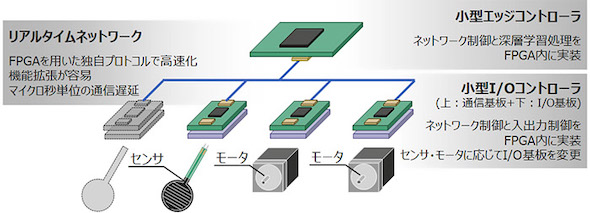 リアルタイムネットワークの仕組み 出典:日立製作所
リアルタイムネットワークの仕組み 出典:日立製作所エッジコントローラーの寸法は40×60mm、I/Oコントローラーは20×30mmと小型で、ロボットのアームやハンドに搭載しやすいサイズとなっている。2つの小型コントローラーとリアルタイムネットワークにより、アプリケーションに応じて最適なシステムを構築できる。
関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
"サイズ" - Google ニュース
April 14, 2020 at 09:00AM
https://ift.tt/2VrW4e1
反射的動作を制御可能、手のひらサイズで遅延時間1msのコントローラーを開発 - @IT MONOist
"サイズ" - Google ニュース
https://ift.tt/2UVEOPG
Shoes Man Tutorial
Pos News Update
Meme Update
Korean Entertainment News
Japan News Update
No comments:
Post a Comment